During the summer of 2022, I interned with the National Aeronautics and Space Administration (NASA), specifically within the Spacecraft and Vehicle Systems Department. One of the projects I contributed to involved a feasibility study on developing contactless magnetic joints for space applications. Lunar regolith, known for its abrasive nature, poses a significant challenge as it can cause damage to components and joints. NASA’s innovative concept of contactless joints utilizes magnetism to levitate, ensuring that the joints never actually come into contact with one another. This design allows regolith to flow freely between joints without causing significant damage, addressing a critical need for space exploration missions.
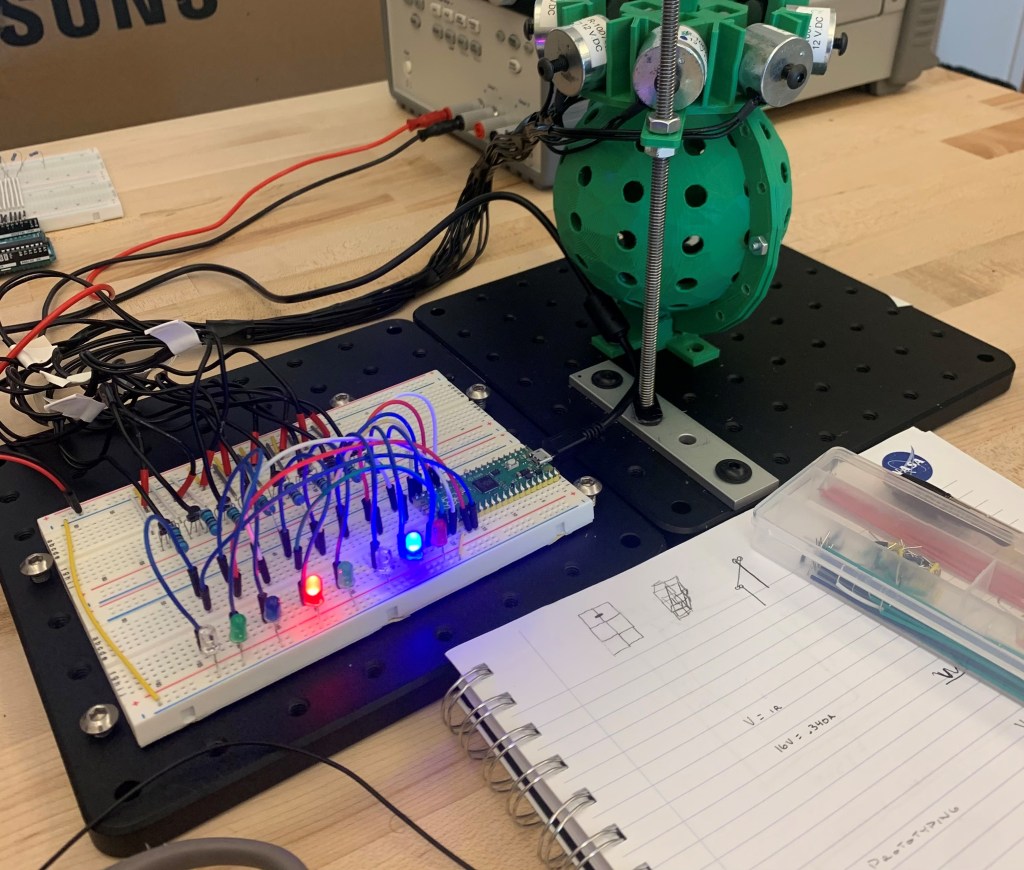
During my involvement in this project, I played a key role in wiring and programming an array of electromagnets to actuate components of the joint. I also contributed to documenting the project by capturing images and videos showcasing the joint and electromagnet configuration. Through careful programming, we successfully achieved rotational control of the joint, demonstrating its feasibility in a controlled environment.
Moving forward, the next phase of this project will focus on enhancing the joint’s load capabilities while adhering to strict rocket payload limits and size restrictions. This will involve further experimentation and optimization to ensure the viability of the contactless magnetic joints for future space applications.
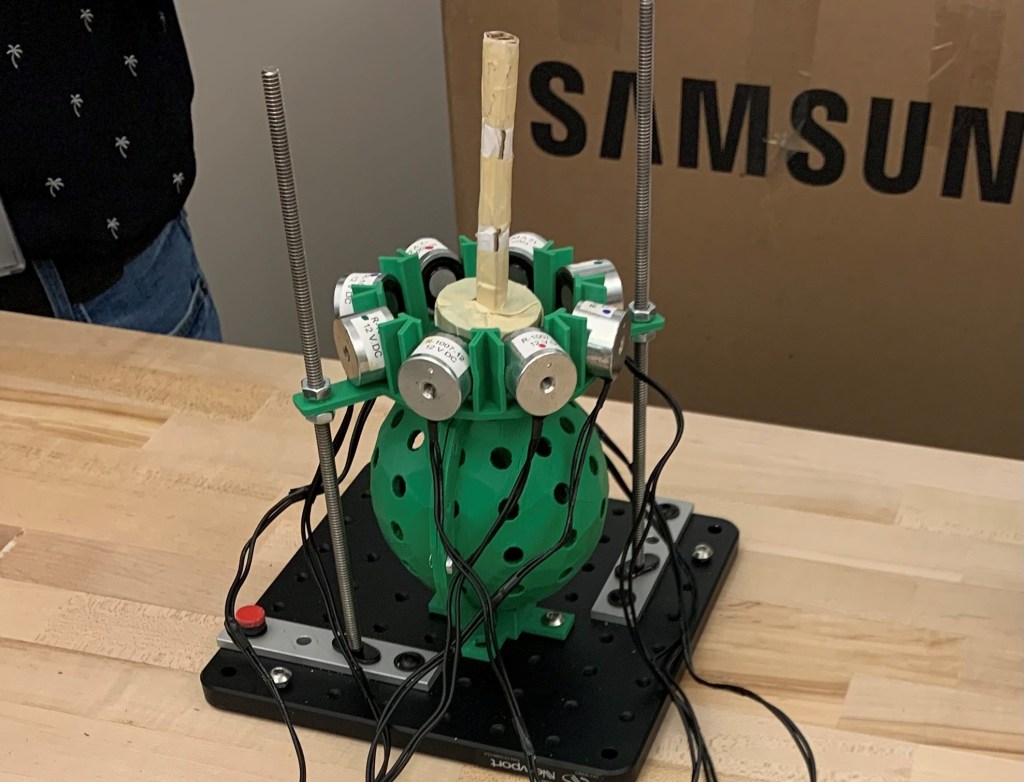
In the image above, this early prototype created by a fellow intern features a large outer sphere housing an inner sphere within it. While the inner sphere is not visible in the picture, it levitates within the outer sphere using permanent magnets. Additionally, the inner sphere is connected to the protruding rod seen at the top of the outer sphere.
Check out this link to see a video of the joint in action! As shown in the linked video, the concept I helped developed involved programming the electromagnets encircling the joint to control its motion, thereby actuating the “arm” of the joint. This innovative approach, along with the lunar arm concept from a separate project, was presented to NASA headquarters. I am thrilled to announce that as a result of our presentations, we secured $3 million in funding to advance these two projects, along with several others currently in development. This substantial funding will enable NASA to further explore and refine these concepts, potentially revolutionizing space exploration technology.
